
Um acidente fatal envolvendo um Tesla Model S no estado da Florida, nos Estados Unidos, reacendeu as discussões a respeito da viabilidade dos veículos autônomos. O carro era “conduzido” por Josha Brown, de 45 anos, no modo Autopilot – classificado como semiautônomo por desempenhar as funções do volante (curvas e trocas de faixa), acelerador e freio, mas ainda depender do motorista – quando um caminhão inadvertidamente atravessou a rodovia, vindo da esquerda, e ocasionou o acidente. De acordo com a Tesla, é provável que o reflexo do reboque possa ter se confundido com o brilho do céu e o freio não foi acionado.
Tudo indica que o motorista não estava atento, já que não houve reação. A empresa afirmou que o modo Autopilot ainda funciona em modo beta (fase de testes), só é habilitado com o consentimento do proprietário, que é informado que se trata de um recurso auxiliar, devendo o motorista manter as mãos ao volante e estar apto a assumir o controle do veículo a qualquer momento. O sistema ainda verifica se o motorista está com as mãos no volante e com a atenção voltada para o trânsito, fazendo inclusive alertas e podendo até desacelerar o veículo caso o condutor não atenda à demanda.
Conversamos com Ricardo Takahira, da Comissão Técnica de Veículos Elétricos e Híbridos da SAE Brasil, que traçou um breve panorama a respeito do tema. “Veículos 100% autônomos já existem, mas os modelos que estão circulando por aí, seja com um nível de autonomia primário ou avançado, são pioneiros no trânsito urbano e nas rodovias”, explica. Alguns exemplos de veículos 100% autônomos são as máquinas agrícolas que funcionam tendo como base as coordenadas do GPS – fazendo todo tipo de serviço, como colheita, adubação e curvas de nível – e a linha quatro do metrô de São Paulo, que, apesar de ter um condutor à disposição para o caso de algum imprevisto, também opera de forma autônoma.
IMPREVISTOS Mas Ricardo chama a atenção para o fato de esses veículos funcionarem dentro de ambientes com interferências externas mínimas, seja numa fazenda com velocidade mínima ou sobre trilhos, onde as chances e as consequências de alguma coisa fugir do script é baixa. “O veículo autônomo depende muito do meio em que está inserido. O desafio é criar tecnologias capazes de prever o que vai acontecer no segundo seguinte, de detectar todos os imprevistos, como um animal que vai atravessar a pista, pedestres, motos, sinais, faixas de pedestre e limite de velocidade.

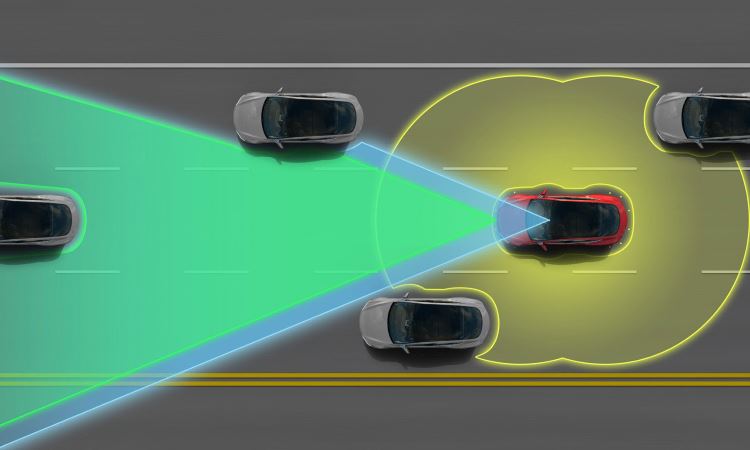
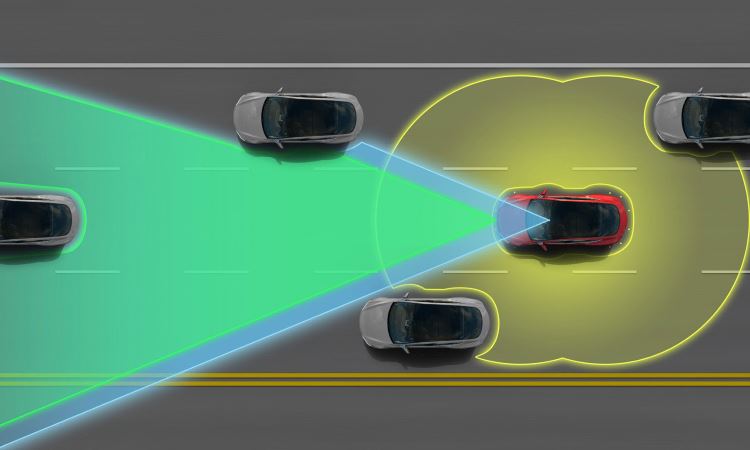
O engenheiro conta que, após passar pelas fases da mecânica, elétrica, eletrônica e das telecomunicações (com o carro conectado!), com os autônomos a indústria automotiva chegou à era da ciência da computação. “Tudo depende de computação, da projeção computacional do próximo segundo: monitorar obstáculos, antecipar-se aos imprevistos, controlar a direção e a velocidade”, explica. Ricardo cita como exemplo o software do tipo V2V (comunicação de veículo para veículo), onde cada veículo informa sua posição geográfica, o que torna possível prever acidentes como o do Tesla Model S.
IMAGEM O acidente fatal também levanta questões como a eficiência dos sistemas de imagem dos autônomos. Ricardo explica que existem muitos tipos disponíveis e que um veículo nunca deve trabalhar com apenas um, mas pelo menos dois sistemas de imagem diferentes. No sistema de câmeras, por exemplo, a imagem deve ser captada, transformada em uma linguagem que o computador entenda para depois ser analisada. As vulnerabilidades são várias, desde o fato de demandar um processamento demorado até a possibilidade de cair um cisco ou folha na frente da câmera. Além disso, esse tipo de sistema é muito dependente da visão, tendo que funcionar desde a escuridão total até a máxima luminosidade, como no deserto. Por isto é interessante mesclar com sistemas de como o de rádio frequência e até a laser, considerado eficiente mas bastante caro.